双向测距
双向测距方法确定 UWB 射频信号的飞行时间,然后通过将时间乘以光速来计算节点之间的距离。TWR 过程应用于 Tag 和请求的 基站之间,在给定的时隙中只能涉及一个基站
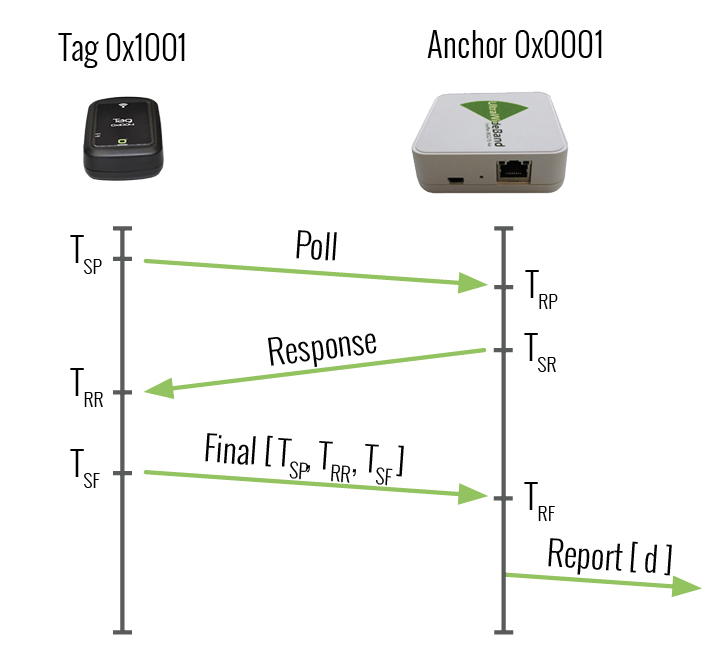
distance = ToF x (speed of light) ToF=[(TRR-TSP)-(TSR-TRP) +(TRF-TSR)-(TSF-TRR)]/4
要测量距离,需要交换三条消息。Tag 通过向基站 的已知地址发送 Poll 消息来初始化 TWR,该地址的时间称为 TSP(发送轮询的时间)。基站记录 Poll 接收 (TRP) 的时间,并在 TSR 时间回复 Response 消息。收到响应消息时的标记记录时间 TRR 并撰写最终消息,其中包括其 ID、TSP、TRR、TSF 信息。根据接收最终消息 TRF 的时间和最终消息中提供的信息,锚点可以确定 UWB 信号的飞行时间。或者,可以在 Report 消息中将结果距离发送回 Tag 或附近的任何给定 UWB 设备。实验表明,TWR 过程的 标签和 基站之间的最佳距离在 20-30 m 范围内。
基于 TWR 的定位
基于 TWR 方案的 定位系统受益于 UWB 设备之间不需要时间同步的想法。另一方面,此功能限制了定位系统的可扩展性,因为 TWR 过程是逐渐应用于系统内的所有基站。此外,Tag 需要了解基站的地址范围,以逐渐轮询所有可用的基站。这种情况如下图所示。
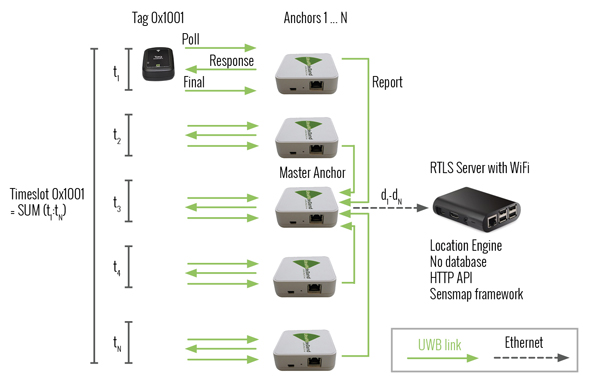
要计算一个 Tag 的位置,它需要启动包含系统内所有基站 的 TWR 进程。因此,完成所有 TWR 程序所需的时隙长度相应地取决于定位系统中的锚点数量。根据 定位系统运行的 Tag 数量,需要一个刷新率内预留适当数量的 slot 时间。根据这个假设,很明显,运行标签的数量和电池寿命受到所需的刷新率和系统中锚点数量的限制。通常,在规划应用程序时,必须考虑达到数小时或数天的 Tag 电池寿命。
覆盖范围和可扩展性注意事项
如 TWR 介绍部分所述,带有估计距离的报告消息可以通过 UWB 无线电发回。这种情况利用了通过专用的 基站无线收集所有结果的可能性,该 基站可以直接将信息发送到定位服务器进行处理。此功能在缩放基站数量方面带来了另一个限制,因为系统中的所有基站 都需要直接与 主基站通信。根据室内环境,基站的通信距离可能在 20-40 米之间变化。

